ardupilot skid steer when not moving, skid-steering vehicles will pivot in response to steering input but .
Komatsu’s smallest excavator – the PC18MR-3 – is a productive and tough little digger that’s ideal for owner-operators, builders, plumbers, electricians, landscapers and other tradies – and .
0 · ardurover skid steer troubleshooting
1 · ardupilot steering input
2 · ardupilot skid steering parameters
3 · ardupilot skid steering not working
4 · ardupilot skid steer problems
5 · ardupilot reversing
Our mini Excavator/Digger Hire in the Welwyn Garden City region offers you premium mini diggers. Delivery is available today as well as tomorrow. Make a booking today.Accelerator Hire takes pride in offering Winchester 1.5 Tonne Mini Digger Hire services for late-model, tracked 1.5-tonne mini diggers, ensuring that our customers receive the perfect tool for .
Most users of skid steering vehicles should leave the PILOT_STEER_TYPE parameter at the .
for rovers with skid steering, “Test motor C” should cause the left wheel to turn .Learn how to wire and configure your rover's motor and servo connections .
There should not be a “skid steering parameter”. Skid steering is enabled by .
To trigger it, set up a skid steer like I have done and set the ESCs to the brushed .when not moving, skid-steering vehicles will pivot in response to steering input but .for rovers with skid steering, “Test motor C” should cause the left wheel to turn forward. “Test .Learn how to wire and configure your rover's motor and servo connections depending on the steering and throttle method. Find the parameters values for .
There should not be a “skid steering parameter”. Skid steering is enabled by . I’ve just upgraded my Cube Black to a Cube Orange on my skid steer rover. My .
To trigger it, set up a skid steer like I have done and set the ESCs to the .
ardurover skid steer troubleshooting
ardupilot steering input
cat mini excavator 305 price
Most users of skid steering vehicles should leave the PILOT_STEER_TYPE parameter at the default of “0” meaning the pilot controls the vehicle using one RC input for throttle and another for steering.for rovers with skid steering, “Test motor C” should cause the left wheel to turn forward. “Test motor D” should cause the right wheel to turn forward. If the motors or steering do not move in the correct direction change the appropriate SERVOx_REVERSED value and try again.Learn how to wire and configure your rover's motor and servo connections depending on the steering and throttle method. Find the parameters values for separate steering, skid steering, omni vehicles and wheel encoders.
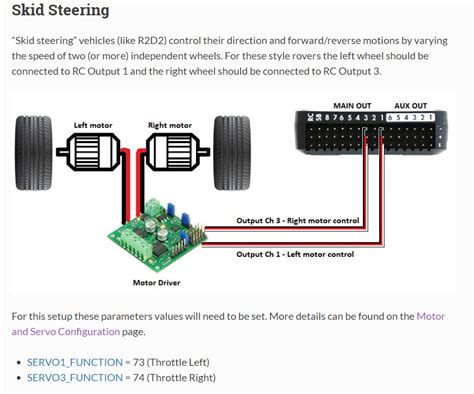
There should not be a “skid steering parameter”. Skid steering is enabled by setting two servo outputs to throttle_left (73) and throttle_right (74). I’ve just upgraded my Cube Black to a Cube Orange on my skid steer rover. My settings to configure the skid steering are:-SERVO1_FUNCTION = 73 SERVO3_FUNCTION = 74 PILOT_STEER_TYPE = 0. Turnigy 9x Mode 1 transmitter using Roll (Ch1) for steering and Throttle (Ch3) for speed. To trigger it, set up a skid steer like I have done and set the ESCs to the brushed option that is not brushed bipolar. Power the motors up, and allow them to arm. Test the motors to ensure they’re actually moving.
when not moving, skid-steering vehicles will pivot in response to steering input but regular steering-throttle rovers will show almost no steering response. the top speed is interpolated from the CRUISE_THROTTLE and CRUISE_SPEED parameters. ArduRover Skid Steering. Posted by Johar Palacita on May 28, 2021 at 4:16am. Hi, I'm building ArduRover with Skid Steering, The platform are base of DFROBOT Pirate 4WD and using 2 DC Motor L298N. I'm using the firmare for Pixhawk 1 (fmuv3) 4.0.0-FIRMWARE_VERSION_TYPE_OFFICIAL. and according the ardupilot docs for Rover.
How do you do the throttle tune on a skid steer system? I found that the left motor starts spinning at 32% and the right starts spinning at 45%, but MOT_THR_MIN only goes up to 20%, and there is only a single parameter for the whole vehicle, not 1 .
This package contains an example demonstrating how to use the ROS2 - Gazebo bridge for a skid-steer rover controlled by ArduPilot. It assumes an advanced level of familiarity with the packages referred to below, most of the dependencies will need to be built from source.Most users of skid steering vehicles should leave the PILOT_STEER_TYPE parameter at the default of “0” meaning the pilot controls the vehicle using one RC input for throttle and another for steering.for rovers with skid steering, “Test motor C” should cause the left wheel to turn forward. “Test motor D” should cause the right wheel to turn forward. If the motors or steering do not move in the correct direction change the appropriate SERVOx_REVERSED value and try again.
Learn how to wire and configure your rover's motor and servo connections depending on the steering and throttle method. Find the parameters values for separate steering, skid steering, omni vehicles and wheel encoders. There should not be a “skid steering parameter”. Skid steering is enabled by setting two servo outputs to throttle_left (73) and throttle_right (74). I’ve just upgraded my Cube Black to a Cube Orange on my skid steer rover. My settings to configure the skid steering are:-SERVO1_FUNCTION = 73 SERVO3_FUNCTION = 74 PILOT_STEER_TYPE = 0. Turnigy 9x Mode 1 transmitter using Roll (Ch1) for steering and Throttle (Ch3) for speed. To trigger it, set up a skid steer like I have done and set the ESCs to the brushed option that is not brushed bipolar. Power the motors up, and allow them to arm. Test the motors to ensure they’re actually moving.
when not moving, skid-steering vehicles will pivot in response to steering input but regular steering-throttle rovers will show almost no steering response. the top speed is interpolated from the CRUISE_THROTTLE and CRUISE_SPEED parameters.
ArduRover Skid Steering. Posted by Johar Palacita on May 28, 2021 at 4:16am. Hi, I'm building ArduRover with Skid Steering, The platform are base of DFROBOT Pirate 4WD and using 2 DC Motor L298N. I'm using the firmare for Pixhawk 1 (fmuv3) 4.0.0-FIRMWARE_VERSION_TYPE_OFFICIAL. and according the ardupilot docs for Rover. How do you do the throttle tune on a skid steer system? I found that the left motor starts spinning at 32% and the right starts spinning at 45%, but MOT_THR_MIN only goes up to 20%, and there is only a single parameter for the whole vehicle, not 1 .
cat mini excavator dimensions
ardupilot skid steering parameters
As part of our digger and driver hire service in Luton, there will always be a knowledgeable operator on your site. They have years of experience and understand the parameters of your project. You can get impartial, real .
ardupilot skid steer|ardupilot steering input